
.jpg)
For this blog, I will be sharing about the competition I and my team attended, the PAS VEX Signature Event. This competition is the first one our team participated in that has world qualifying awards. The teams that got the excellence award or the tournament champion get a ticket to VEX Worlds.
Continuing from our last competition in AST, we decided to construct a new robot that could solve the problems of the old one. However, we were in a rush, since there were only 3 weeks before this competition, and we only had a chassis constructed.
The part we modified the most was the shooter mechanism, we changed from a catapult system to a flywheel system. Mainly because we want to be able to shoot out triballs from the back of our robot. We made the middle of the robot hallow, for the triballs to pass through.
In the current robot, we utilized a special feature of the triball design. Triballs are designed to be a reuleaux triangle, which, when the triangle passes through two parallel surfaces, will act and spin like a circle. With this idea in mind, we made the tunnel's top, bottom, and sides all into flat surfaces, so the triball can spin freely while flying out.
The robot's completeness and practice proficiency were both not very perfect. I personally think the completeness of the preparation for this competition is not really enough. However, we didn't have much time for improvements either.
The PAS signature event is split into three days of competition. The first day mainly focuses on practice matches and skills attempts, which is relatively an easier day. The second day starts with the real qualification matches and rankings, with a tight schedule. The third day has some qualification matches in the morning, and final matches in the afternoon.
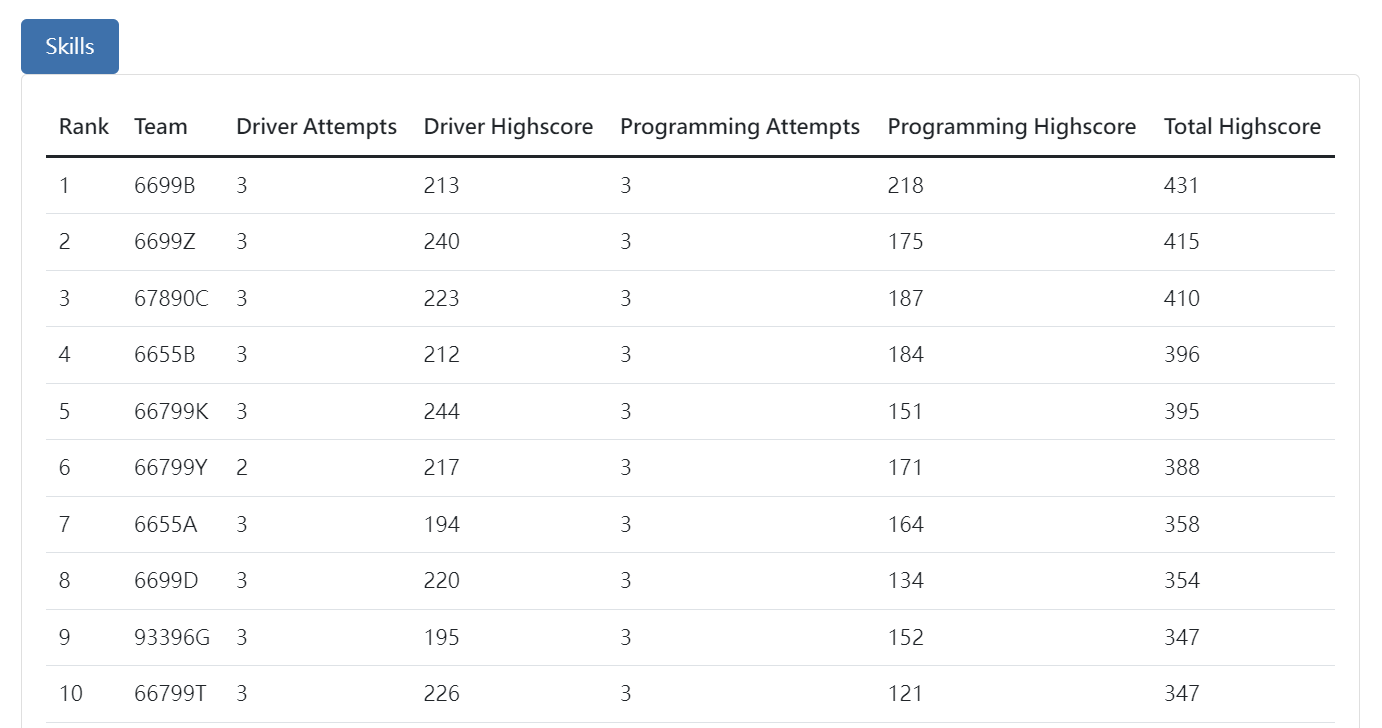
We aimed for skills during the first day, because this is the time when we have the most free time to do so. The main problem we met was not being able to reach a stable score in our skills because our match loading was not good enough. At the end of the day, we reached rank 5 skills, with 163 in driver, and 79 in autonomous.
During the second day, our main objective was to rank as high as possible in qualification rankings. We reached rank 32 out of 57 teams which wasn't an ideal score for us. The main problem was that the driver wasn't completely familiar with the new robot, so we got stuck sometimes and didn't take full advantage of the robot.
Excellence award, the top award that can get you into the world championship, requires your team to rank in 30% of the qualification ranking. In this competition, we have to rank higher than 17 so we can at least be the excellence award candidate. This is why the last few qualification matches on day 3 are very important to us.
We won the first qualification match but lost the rest on day 3. Our alliance team had an overheated chassis during the match and couldn't move. I think we will also have to check our alliance partner's robot state during pre-match communications.
Our qualification ranking was 23 at last, excluding us from the excellence award. The only hope left is to get the tournament champion during the finals.
.jpg)
We paired up with 66994P as our alliance since we were a great match in the AST league. We ended up losing in the semi-finals because both of our teams weren't able to do the elevation mission successfully.
At the end of the three-day journey, we are awarded the Think Award. Ranked 3rd in skills, with 163 in driver skills and 140 in autonomous skills. Ranked 23 in qualification matches, and stopped at semi-finals.
I think this is quite an interesting journey. One thing I have learned throughout the whole preparation process and the competition is that not every time the effort put into the competition will give you the expected outcome. Even though I spent the whole 3 weeks preparing for the competition, trying to evaluate the best state before the competition, sometimes the preparation and time might still not be enough for us.
The competition journey is very valuable. Until the next competition, I will do my best to improve our robot design and tournament strategies. Hopefully, we can get the ticket for the world championship in our next competition. See you next time :)






.jpg)


.png)

.png)



















.jpg)











.png)









