This VEX IQ has come to an end for us 6699B. Even though there is still a world championship coming up in May, we decided not to go because I have a test coming up that overlaps with the championship. Our last competition for this season is an online LRS(Live Remote Skills) competition in Taiwan.

In this competition, we managed to pull off 431 points with both skills challenges scores sum up. This made us the top in Taiwan, and also the first place in world skills standings. Initially, the highest score was 423 points, and two teams got tied for this score, one team is from China, while the other is also from our organization in Taiwan, team 6699Z.
Before the competition, the highest score that we have ever gotten in driver skills is 248 points, while our highest in autonomous skills is 242 points. Adding these two up contributed a score of 490 points, which is only 50 points away from the maximum possible score of 540 points.
Our average score in driver skills during practice is around 220-230 points, while the autonomous skill is about the same level. Our minimal goal was to get 430 points, which both needs to meet the requirement of 215 points.
The competition starts at 9am in the morning, and every team gets to choose their ideal time for the competition, the competition lasts for an hour. We chose to start at 11am, this way we can still practice after waking up.
We did the inspection the day before at night to check if our robot and our field is in good condition. We were super nervous during the 1 hour of competition. Even though we practiced nonstop beforehand, we still messed something up during driver skills.
I accidentally drove too fast while getting the blue dispenser, and 2 discs fell onto the ground. This is a serious mistake because 2 discs can deduct a maximum of 8 points from our total score. My brother, who is driving the final half of the match, also drove too fast and one disc flew out. Luckily, we still manage to get a decent 213 points, just 2 points away from our goal.
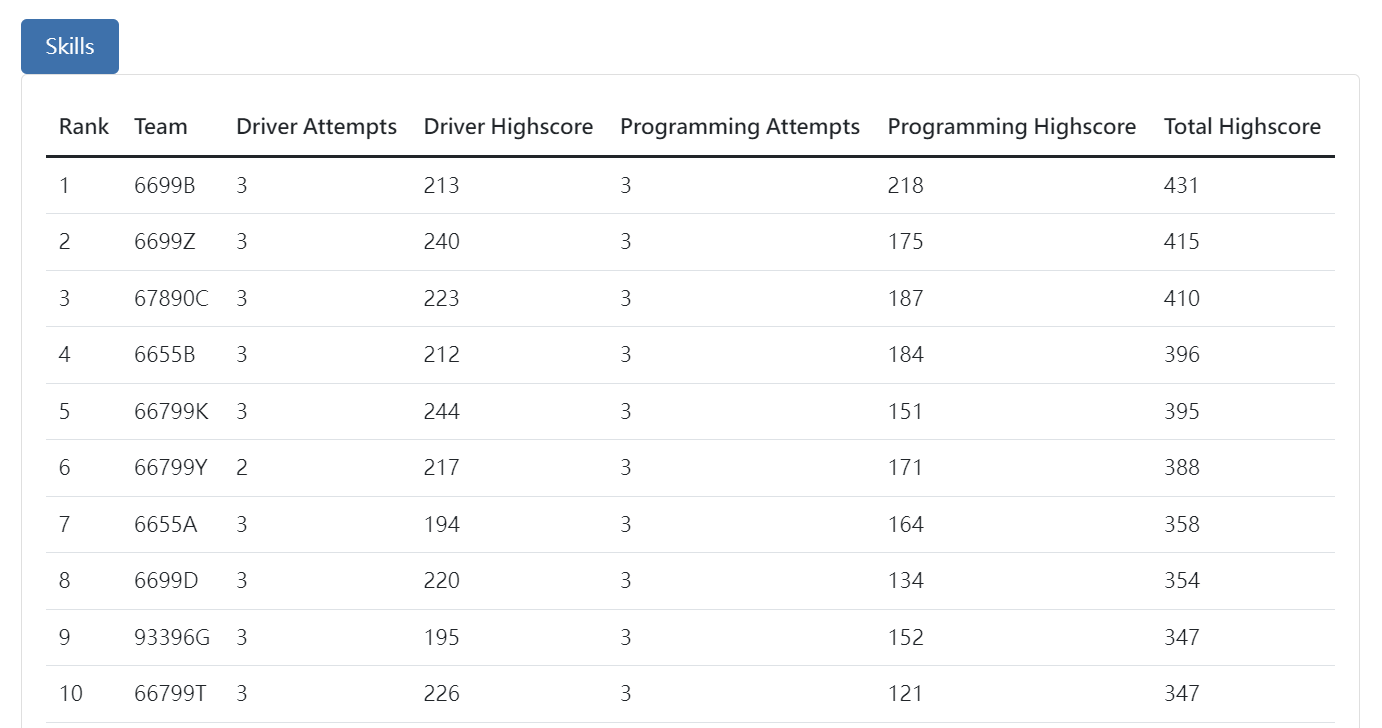
Our autonomous did very well unexpectedly, we didn't have to modify a large amount of code before it is actually stable. I guess our hard work surely paid off. We got the highest score of 218 points, and this got us first place in the worlds standing for now with 213+218=431 points.
This is very meaningful to us, not only we managed to take down first place, but we also proved to the world that the robot we made by ourselves has the power to rank number one. The proudest part of our robot would be the ability to complete all missions with autonomous skills since that was impossible for our robot in the previous seasons that we participated.
I hope the score can stay in place for a longer duration before it gets surpassed. I also uploaded two videos about this, one is showing the fifth-generation robot we used for this competition, and the other is showing the two skills matches that got us 431 points.














.jpg)