這次要介紹的不只是 VEX IQ 國中組世界賽 5/8-5/10 當中所經歷的比賽過程,還包括整個 VEX 世界賽當中所看到的隊伍攤位、大學和贊助商攤位等等。我們獲得的獎項有兩個,分區賽冠軍以及巧思獎,會在本文最後進行描述。
這一個隊伍是 68689X,隊名為 Something Ain't Right,來自美國加州的隊伍,參加的是 VRC 國中組。黃色主題的攤位,從遠處看都可以很清楚看到他們的特別之處,以小小兵作為主題,攤位地板上擺放許多充氣的小小兵,桌上放的是用黃色的場地道具 Neutral Mobile Goal 裝的糖果,我們收到的紀念品則是一根寫著隊伍編號的香蕉。最終他們有打進 VEX Dome,卻很可惜的在第一輪八強賽中就被刷掉了。
13113C Wolves,來自德州的美國隊伍,參加的是 VRC 國中組。攤位上擺放著紀念品和機器人,他們的機器很簡單,是由一個底盤和可以抬起的兩根鐵桿組成,可抬高的鐵桿是用來抬起在場地上的 Mobile Goal,但他們機器一次只能夠抬起一個,也不夠抬到平衡板上。
頭上戴著彩虹魷魚帽子的隊伍 9791C WalshBots - Covid Chaos,來自麻薩諸塞州的美國隊伍,一樣參加 VRC 國中組。攤位後方掛著布條,桌上擺放的是糖果、胸章和手環等紀念品,還有機器人,他們的機器可以同時舉起兩個 Mobile Goal,一個在車子的前方,一個用車子後方的爪子抓取,在 15 秒自主的策略是優先抓取中間黃色的 Neutral Mobile Goal。
#40044A Totins
40044A Totins,是一個來自內華達州的美國隊伍,參加的是 VRC 的國中組,他們攤位上最吸引人的是插滿棒棒糖的 Neutral Mobile Goal,不僅在 Mobile Goal 的圓盤處放滿棒棒糖,也在上面伸出的管子當中插入,他們也很歡迎經過的人隨意抓取一大把棒棒糖,因為實在是太多了。在桌上也擺了一個三折板,介紹他們機器不同的裝置設計,在前方的柱子也代表他們參加過三年的 VRC 競賽,是一個很有巧思的設計。
在桌上也擺放他們的機器人設計,最特別的地方是,在抓取 Mobile Goal 的地方,有安裝觸碰感應器,當 Mobile Goal 觸碰到裝在感應器上的零件,爪子就會自動伸下來。他們的機器在爪子的部分也有用心設計,因為在之前的比賽中看到其他隊伍有這樣的設計,他們在上面加上壓克力板子,擋住 Mobile Goal 圓盤的部分防止其他隊伍抓取,覺得很有創意,也是在攤位中少數有這樣想法的隊伍。
#839Z // Caution Tape //
Caution Tape,一間由 Daniel Yu 老闆創建在加拿大的公司,專門發展 VEX 機器人,在 VEX IQ 有很大的名氣,這次我們剛好也在 VRC 國中組當中遇見了他們。839Z // Caution Tape //,是我們這次在攤位當中遇到的隊伍,他們的教練會說中文,和我們聊了很多,紀念品的部分則是拿到手環和貼紙。
VEX VRC 高中組攤位參訪(5/5-5/7)
#5999A Eagle Siege
雖然此時高中組的決賽已經結束,但是當時訪問到最令我驚艷的是 5999A Eagle Siege,來自美國田納西州的隊伍。
他們的機器可以一次抓取兩個 Mobile Goal,一個在前面,一個在背後。在自主的 15 秒當中,他們有很多個策略的選擇,可以抓取中間最高的 Neutral Mobile Goal,也可以抓取旁邊較矮的 Neutral Mobile Goal,還可以抓取兩邊的一般 Mobile Goal,在左右邊的自主都可以完成一個普通和黃色的 Mobile Goal。在每一場賽場前都會進行調查,若對面隊伍的車子速度較他們快,就會選擇去拿中間的黃色 Mobile Goal。
我覺得有很多策略選擇是一件聰明的事情,在比賽當中就提高獲勝的機會,因為可以依照對手的機器做調整,可以增加 15 秒自主的勝率,是一個我很欣賞的做法。
如果你們未能在前十五秒的自主當中獲得優勢,例如目標的黃色 Mobile Goal 被搶走,怎麼辦?操作手說,他們的策略是將敵隊機器壓到牆上,直到敵方放下 Mobile Goal 或是稍微露出破綻。
在 VRC 比賽中,還有分數很高的得分方式,將紫色圓環放置 Neutral Mobile Goal 延伸出的支架上。然而他們的機器並沒有這項功能,因為缺少馬達和零件,所以沒能完成這項得分項目。
最終他們在這次的比賽中打出的成績是 3 勝 7 敗,其中在資格賽第 21 場次中以 157 對上 84 的分數打贏台灣的隊伍-鯊魚隊 96944B Sharks G.C,可惜的是他們最後沒有得到任何的獎項。
我覺得這個隊伍的分工很清晰,有程式手,操作手和策略規劃人員,我認為他們在份內的工作都很融入,這也讓他們在接受我的訪問時,都會回答自己專長的問題。
在 YouTube 上可以看到他們
Driver 294 分的影片,但是在 Auto 上他們就沒有特別研究,在這次的比賽中,Skills 就只有打出 Driver 207 的分數,而 Auto 就沒有前往比賽。
#3400F Steeltooth Robotics
在我訪問到的隊伍當中,我還想介紹的一支隊伍是 3400F Steeltooth Robotics,來自美國阿肯色州的隊伍,這是他們的第二年參加 VRC。
當時光顧攤位時,僅有兩位隊員看守攤位,其中一位是機器人設計者,是他介紹機器給我們聽的,當我一詢問到機器,原本坐在椅子上聽音樂的他馬上跳起來和我介紹,我很欣賞這種對機器人的熱情。
他們在 Opportunity Division,積分賽的成績是 4 勝 6 敗,雖然表現的不是太突出,最終也沒有得到任何獎項,但是他們的熱情卻讓我深入了解機器人設計。
他們的機器可以一次拿兩個 Mobile Goal,一個在前面,一個在後面。在自主的策略當中,是以搶旁邊的 Neutral Mobile Goal 為主,因為他們認為要瞄準中間的太困難,穩定度並不是很高。
他們沒有辦法自行平衡在平衡木上,需要隊友協助推上去,所以不會預留時間去做平衡任務,若真的要做則會預留 20-25 秒的時間。
如果你們還有機會修整機器,你要修哪一個部分呢?他們說最想要修的部分是吸取紫色圓環並放到 Mobile Goal 的 Branch 上的裝置,因為現在的裝置並無法很穩定的套入 Branch,常常會掉落到盆子當中。這種不斷思考著改進方法的精神是我很欣賞的,也再次顯現出他們對機器的熱情。
在這次比賽 Skills 的成績當中,他們排名第 354 名,Driver 得到 160 分,Auto 則沒有去比賽,可見很多隊伍是不太涉略 Skills Auto 這一塊的。
我最喜歡這支隊伍的部分是他們對機器的熱情,不害怕的介紹自己的機器,為自己打造的機器驕傲,雖然成績不是很理想,但是令我印象深刻。
VEX U 機器觀摩(5/3-5/5)
#ECTC1 ECTC
在兩旁都是攤位的街上行走,突然看到旁邊經過推著推車,上面放著機器人的團隊,不知道他們的隊伍編號和名字,但是印象很深刻的是機器上的兩個大的氣壓罐,他們說為了增快爪子的速度,他們選擇使用氣壓罐,而 VEX 原廠的太小,所以自己做了兩個大的放在機器上,這是我第一次看到氣壓罐的應用在 VEX 機器上。他們看起來是大學生,和我們講話的態度很好,讓我覺得他們很親切。
後來上網查詢後,發現他們是 VEX U 的隊伍 ECTC,來自美國肯塔基州,Elizabethtown Community and Technical College(伊麗莎白鎮社區技術學院)的隊伍。VEX U 是大學組的 VRC,題目雖然一樣,但是自主時間從十五秒延伸到四十五秒,一隊必須製作兩台機器,成為一對一的比賽。
VEX IQ 國中組攤位參訪(5/8-5/10)
#54506D Beast Hunter
54506D Beast Hunter,來自日本東京,唯一的日本隊伍,在 Opportunity Division。在前天贊助商的參訪當中遇到他們,並答應會去看攤位,我身為守信用的人類,今天前往拜訪。
他們的機器是飛輪機,用兩個輪胎將球一顆一顆發射出去。
有考慮過用投石機的彈射裝置嗎?他們說因為是自己設計的機械結構,所以決定用這一台機器來世界賽和其他隊伍競爭。
用飛輪機,因為每個場地的狀況都不太一樣,射球的部分你們怎麼處理?他們說可以利用調整輪胎上的橡皮筋、馬達的轉速等等來調整,但的確是不容易,像是在日本場地的球就較達拉斯場地的球硬,所以需要蠻多調整和測試。
日本隊的機器上並沒有高掛或低掛的裝置,因為沒有多餘的馬達可以使用,機器也已經接近大小限制,沒有吊掛系統。另外他們認為機器還有一些缺點,如果有時間的話,他們想要增加射球的穩定度,讓得分率提高。
底盤的加速是 3:1,是用齒輪帶動的,但因為車子上方的飛輪裝置太過沉重,其實跑起來並沒有那麼快,飛輪部分的加速是 15:1。
在一分鐘內,他們大約可以投入 12 顆球,但在今天的 Skills 比賽當中,Driver 只打出 36 分也就是六顆球位於高得分區。
因為學習過日文,看到他們很吃力的使用英文介紹機器,便用日文開啟讓他們瘋狂介紹機器的模式,使我了解許多機器的細節。但是可能在日本語言當中,有一些名詞和英文不一樣,像是他們就不了解 Gear Ratio,不過還是可以看著齒輪大小計算出來。我很喜歡日本的隊伍,但是在這次的訪問中,還有一隊的機器人設計是最令我驚艷的。
攤位設計的部分,桌上擺放一面日本國旗,上面給來訪過的隊伍簽名,紀念品的部分則是貼紙,後方則是一張大的布條,和在日本拿到 Excellence Award 的證明。我認為和 FLL 日本隊的攤位比起來,較沒有一些令人印象深刻的特色,但還是將機器講解的很好。
#47764A Chameleons C
47764A Chameleons C,來自哥倫比亞的隊伍,他們很熱情歡呼並招待每一個來訪的人,也會一起拍照,雖然如果不是當事人可能會覺得有點吵 XD
他們的機器可以吸四顆球,吸到五顆球就會影響到射球裝置,機器的後方有高掛,上去的時間大約是五秒鐘,Driver 可以達到的最高分是 152 分滿分,但是在 Auto 的部分就沒有涉略。
訪問的時候,他們的高掛系統沒有調整好,沒有辦法掛上去,按按鈕會因為往上升太多而沒辦法往下降,我猜是他們寫 SetMotorTarget 給的角度太多卡住。
齒輪的齒輪比是 2 倍加速,高掛的部分是 1:5 減速再帶一個 3:5 減速,總共是 3:25,大約 8 倍減速。
在現場他們有實際遙控給我們看,雖然吸球和高掛有一些狀況,但是他們的遙控還是不錯的。
他們最想要調整的地方是吸球裝置,現在因為吸球不順暢,耽誤許多遙控時間。他們吸球的地方是用橡皮筋做,看我們用橫桿組成的牆壁不太一樣,我想這可能是導致吸球不穩定的原因之一。
攤位佈置的很精緻,在布條顏色的選擇和文化的特色甚至衣服的配色,都可以讓在遠處的人一下就看到這色彩鮮明的攤位。加上他們熱烈的歡迎,完全消除掉訪問時緊張的心情。
#80896Z Mililani Mechs
80896Z Mililani Mechs,來自夏威夷的隊伍,在 Arts Division,他們的機器可以攜帶最多六顆球,但是四顆球為主。
我認為他們最特別的結構是 intake 的齒輪連結方式,intake 的位置在機器的前方,但是驅動的馬達卻是放在機器中後方,因為前方的空間不夠,利用鏈條帶動齒輪,先使用一個 2:1 的齒輪加速來讓上面的 intake 滾輪變快,下方的齒輪則因為使用 1:2 減速而和馬達是 1:1 的轉速,和我們一樣的是下面的較上面的滾輪慢。
他們的高掛只需要大約三到四秒就可以掛上去,在高掛旁邊有兩個 Touch LED 感應器,右邊的是在 Auto 時開始程式用,左邊則是防止機器爆炸不受控時使用,當機器卡住時,只需要按下左邊的感應器,程式便會強制停止,我覺得這是一個聰明的設計,這使機器爆炸時不用花費尋找主機按鈕的時間。
這一隊的機器當中有很多小巧思,也有很多和我們機器不同的設計,讓我覺得很特別。攤位的藍色佈景主題,和他們的隊服和機器都有相符合,尤其機器的全藍色設計,讓他們在場上特別顯眼,我真的很喜歡機器單一顏色的設計。
#6891S Sanitized Speedracers
在收拾攤位時,看到在攤位斜對角的隊伍,他們擁有我見過的機器當中,我覺得最讓我印象深刻的,6891S Sanitized Speedracers 和 6891T Tech Cerberus 的機器,他們做的是同一台,不過分別是紫色和橘色。
他們機器最特別的是 intake 和射球的位置,和我們的機器不同,兩個裝置是相反邊的,這樣可以增加球的儲存量,從原本的四顆球增加到 8-10 顆球,但他們覺得對策略其實不會有太大的優勢。不過我認為這樣的設計可以減少許多在吸完球之後的迴轉,可以增加一些穩定性和減少時間的浪費。
球從 intake 上去之後會到達旁邊的分球區,利用 VEX 新出的塑膠片導入球,接著在射球裝置前端有馬達帶動的送球裝置將球倒入,很像之前十顆球機的倒球設計,最終進籃筐。
因為馬達已經全數使用,倒球裝置和射球裝置使用的是同一個馬達,我認為這不是很簡單的事情,因為要算好進球和射球的時間,想必他們在調整過程中一定經過很多次測試。另外他們射球裝置使用的是間歇齒輪,橡皮筋是拉在後面,不太好調整力道。
高掛的部分主機放在上面,齒輪比是 1:15 減速,是用兩個馬達帶動,但他們也說如果有時間,希望可以改成一顆馬達的高掛系統。
Intake 有分上下兩個滾輪,兩個齒輪比都一樣是 2:1 加速,是利用鏈條帶動。底盤是使用齒輪底盤,和我們一樣是 24 齒的齒輪帶 12 齒的齒輪,是兩倍加速齒輪比。
他們因為花太多時間將機器調整到最好的狀態,沒有充分的練習遙控,一場一分鐘的比賽中只能投進 8 顆球,而自主的部分還在處理,沒有使用陀螺儀校正,但是目標是 16 顆球。
機器當中使用很多 VEX 第二代的零件,像是主機、電池、馬達和感應器等等都是,他們表示自己身為新世代的小孩,就當然要使用新一代的零件囉。
第二代的零件剛出沒多久,就將它和一代零件做混合運用,這種挑戰的精神,雖然因為時間分配不均而導致策略不完全,但是我真的很喜歡他們的機器人設計,也很喜歡他們介紹的過程和挑戰的精神。
#10404A Cold Spring
雖然第二天比賽當中的隊伍當中沒有令我覺得很驚艷的,但是卻有一些很特別的機器,這次要介紹的是 10404A Cold Spring,來自美國印第安納州的隊伍。
他們的機器可以收集六顆球,也可以進行高掛的動作,他們可以在一分鐘內清空場地,得到 152 分,所以在資格賽中我們使用的是平分球數 12/10 的戰術。
我們收集六顆球的主要結構是棘輪裝置,而他們使用的是用坦克鏈條做成滾輪,上方加上幾個灰色鯊魚鰭狀的零件讓球可以被運送,和 intake 是同時連動的,和我們的棘輪一樣。連動的部分是利用鏈條帶動,滾輪裝置和吸球的 intake 裝置的齒輪比都是 3:2 加速。
底盤的部分齒輪比是 1:1 原速,是齒輪底盤,可以增加穩定性,但是在輪胎附近的橫桿組裝當中,並不是那麼整齊,很多橫桿都有凹進去的跡象,在照片當中就可以看到前面和後面橫桿的連結差一個洞。
彈射裝置的齒輪比是1:5,而大的 60 齒齒輪旋轉一圈可以射三次,所以和我們一樣都是 600 度射一圈,但他們使用的不是黑色的十字軸轉接器,而是使用一個像賓士的零件來完成 Choo Choo Mechanism。
我認為他們的機器最特別的地方是,看起來非常不堅固也凹凸不平,甚至高掛的橡皮筋也是隨便拉的,但是最終他們還是可以達到目標。
VEX IQ 國小組攤位參訪(5/10-5/12)
#1069K Awkward Cats
1069K Awkward Cats,來自美國科羅拉多州的隊伍,他們機器很特別,使用的感應器和其他主流的隊伍都很不一樣,這也是讓我願意在他們攤位停留並進行訪問的原因。
他們的機器前方安裝 VEX Vision Sensor,看起來像是 VRC 感應器,卻其實能夠和 VEX IQ 主機連通並撰寫程式的感應器,這是我第一次看到 Vision Sensor 也是我第一次看到它的運用。這個 VEX 視覺感應器和我們在 FLL 當中使用的 PIXY 視覺感應器極為相似,都可以追蹤顏色的動向。
利用 VEX Vision Sensor,他們拿來在 Auto 的部分運用,追蹤黃色的球,當看到前方有球時就會前往吸取,這讓他們在自主最高分可以投入 14 顆球,然而在這次的比賽場地上僅投進 2 顆球。我認為這是一個很有趣的想法,但是因為是偵測顏色,很容易被環境燈光以及其他相同顏色的物件影響,而且程式寫起來相當複雜。
另外他們在機器側邊加上觸碰感應器和伸出去的桿子,當桿子碰到牆壁時就會觸發觸碰感應器,並進行轉彎的動作,他們認為這個設計也增加了自主的穩定性。
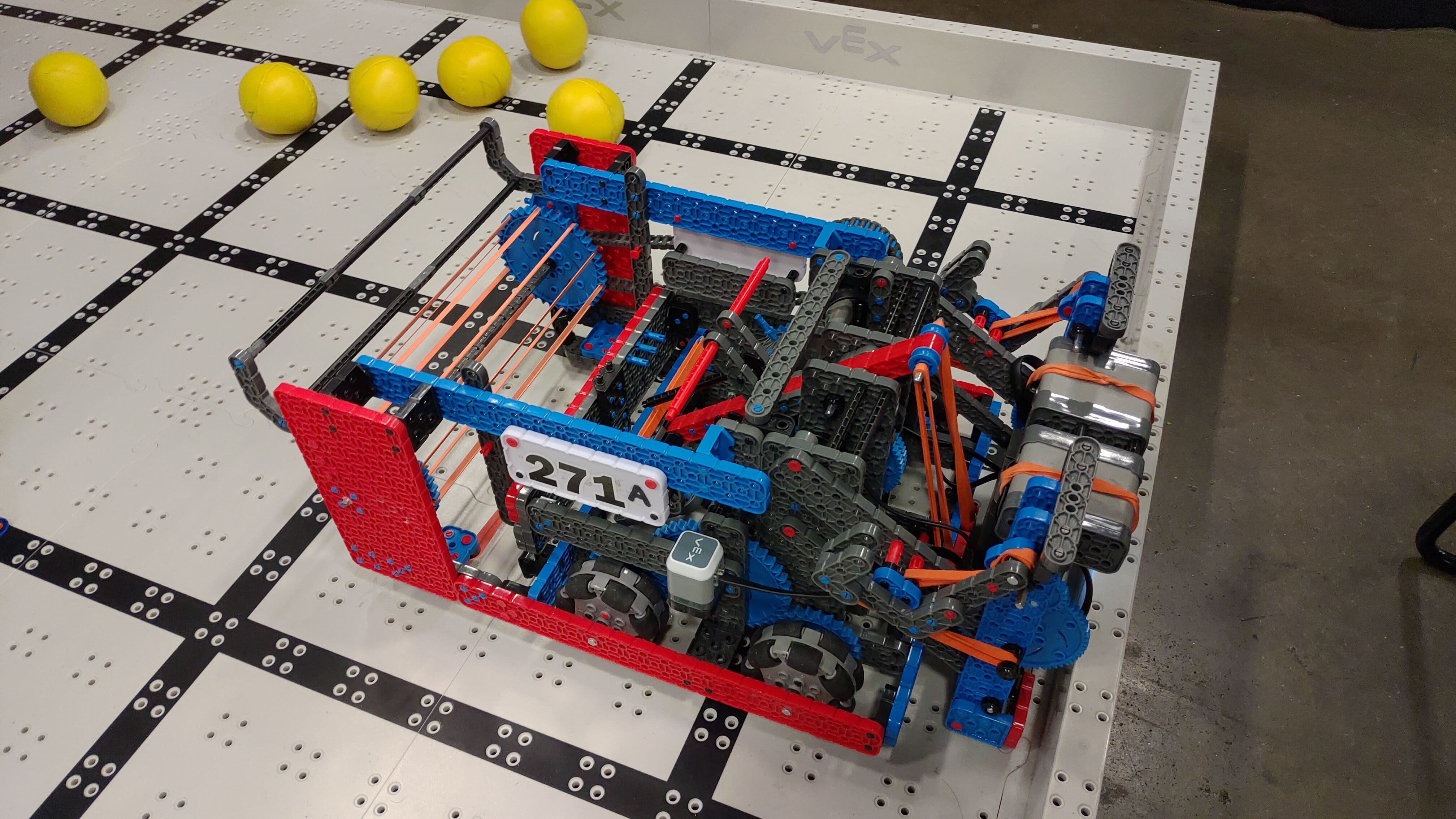
#271A Techno Turtle
271A Techno Turtle,來自美國加州的隊伍,也是一個我在這個賽季中,在一場 LRT 比賽中配對過後都一直關注的強隊,他們在這個賽季中的成就也是非常高,一說到國小組 VEX IQ,第一隊想到的絕對是 Techno Turtle。
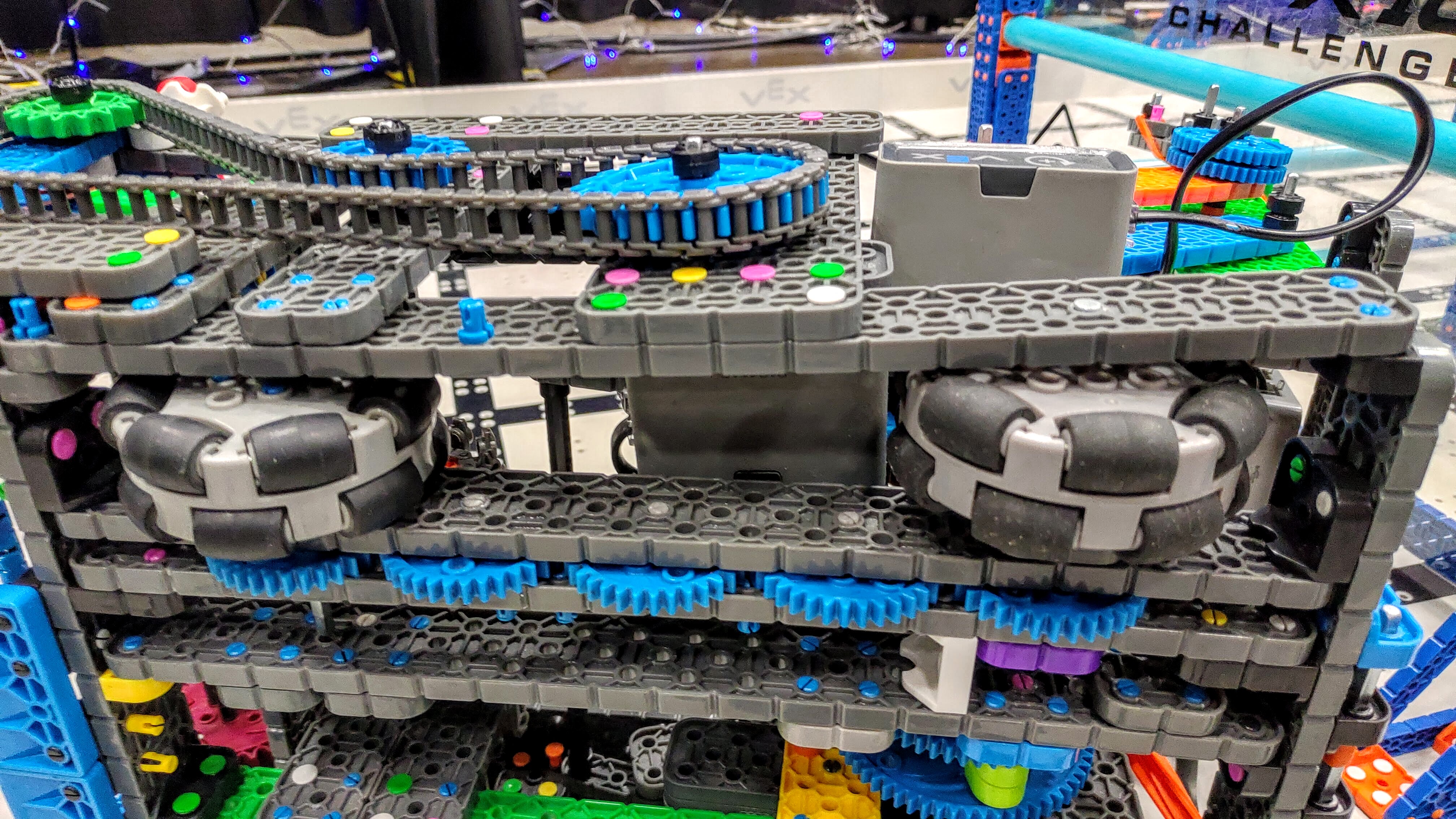
他們的機器可以吸取六顆球,也可以進行高掛,最特別的是收集六顆球的設計中並沒有像我們一樣使用棘輪裝置,僅在大型 intake 滾輪上方加裝集球區就解決,這真的是我沒想過的設計,這省下複雜的棘輪結構,也讓機器保有大型滾輪而吸得到柱子下的那顆球。
底盤的設計也很特殊,利用鍊條齒輪做出 1.666... 倍速的齒輪比,射球的部分和我們很相似,但是在球架下方有連接出兩根長軸,防止球跑到機器的肚子中,我認為這是一個很好的設計,如果有這個防呆,可以避免很多不必要的失誤。
高掛的部分不是一扣上去就可以掛,需要後退一下確保機器有頂住低橫桿才能高掛。另外我們也有讓他們跑 20 顆的自主路徑,策略和我們的完全相反,沒有使用任何陀螺儀程式,但卻跑的非常穩定,連我都沒有把握可以一次就跑出 20 顆球的路徑,他們竟然做到了。
我很喜歡他們的機器人設計,在靠牆的部分因為將側邊做成平的,不需要擔心卡到,也可以很容易吸到卡在牆角的球,而且機器整體很小台,跑的也很快。在每一個細節處理的都很到位,也盡可能地做到防呆機制,避免很多人為可能造成的失誤。
贊助商攤位參觀
Waymo 自動駕駛公司
贊助商當中最吸引我的是 Google 的子公司 Waymo,一家研發自動駕駛的公司。我之所以對他們很有興趣,是因為在這次 FLL 專題 E 貨車的研發過程中,在資料收集當中,參考了很多他們做自駕車的想法。
在攤位展示上擺放著一台自動駕駛車,聽他們說這是可以預約叫車的服務,很神奇的是這是 level 4 自動駕駛,不需要人類司機在駕駛座看著車子駕駛,但在測試過程中,仍是需要有駕駛觀察。在台灣的法律中,因為不允許 level 4 自動駕駛,在我們 FLL 專題研究上也就成為一種阻礙,所以我們專題仍是 level 3 自駕車的想法。
在車子旁邊放著兩台 iPad,可以從當中看到 360 度的還車車景,可以清楚看到他們如何偵測路標、方向盤和快速鑽出的行人等等。
其中在測試以及實際上路當中,完全沒有出現車禍事故,他們表示這可以偵測三個足球場(大約 274.32 公尺)以外的路障,以及快速鑽出的車輛和行人,所以不用擔心。他們的自動駕駛當中也可以偵測是否有救護車和消防車等車輛經過,再讓路。
因為和我們 FLL 專題有關係,所以我也進一步詢問關於自動駕駛貨櫃車的研發過程。在 Waymo 的部門當中,有一個專門研發貨櫃車的 Waymo Via,正在研究關於運送貨物,自動貨櫃車也在研發過程中。
我覺得他們的研發項目很酷,但是在攤位詢問時就不是這麼順利,很常答非所問,可能有些在場人員對自動駕駛和研發過程了解不深。但整體來說,我認為收穫很多,尤其因為和 FLL 專題非常有關係,讓我在訪問時很興奮。
Kodiak Robotics 高速公路自動貨櫃車
我想介紹一個在 VEX 會場中看到驚人的發現,在會場外面停放著一個由 Kodiak Robotics 研發的全自動貨櫃車頭。欸!全自動貨櫃車頭是不是很耳熟?不就是我們 Tai-Botics 今年 FLL 的專題方向嗎?沒錯!這就是我們今年的專題想法,看到實體在眼前我便去訪問了他們公司,了解研發過程。
他們的車頭兩旁有兩個感應器組成的柱子,當中有雷達偵測器和聲音偵測器,在車頭上方有照相機可以看到前方狀況。因為這些感應器,電腦可以看到幾乎 360 度的環境,解決大部分的死角位置,唯一的死角是車頭正前方一公尺處,所以在自動貨櫃車測試和實際運行的四年當中,完全沒有發生事故,
這台自動貨櫃車和我們專題一樣,在城市路段當中都是由人類駕駛,到高速公路後,只需要切換成自動駕駛模式就可以了,人還是會在上面,但是可以在貨櫃車後方休息睡覺減少司機疲勞,
那你們的這台自動貨櫃車是幾級的自動駕駛?在城市路段當中是屬於 level 3 的自動駕駛,而 level 4 的定義是在 ODD (Operational Design Domain) 當中的駕駛,在自己設定的自動駕駛區域駕駛,像是他們的 ODD 就是高速公路路段(也就是說在高速公路上就是 level 4)。
你們在研發過程中,有和其他自動駕駛的公司合作嗎?在自動駕駛公司當中會有一定的交流,但是因為仍是處於競爭狀態且大家都想先行研發出來,並不會接觸太深。
你們要怎麼解決法律的問題?目前美國中的每一州法律都不一樣,在德州的高速公路上可以不需要人類在駕駛座看,也可以去後面休息等等。
他們每一次出發的自動貨櫃車都一定會回到公司,並將這次運行過程的電腦資料都再閱覽一次,讓自動駕駛不斷進步。
這一家公司研發貨櫃車頭的目的也和我們一模一樣,為了減少司機在高速公路上的疲勞感以及減少車禍事故增加安全性,也可以增加貨物運送量,因為自動駕駛車子可以運行 24/7。
這次看到這一台全自動貨櫃車,我真的非常有興趣,因為看到專題真的被實現,也證明我們的想法是真的可以實踐的。如果日後繼續發展,說不定真的可以成為所有天氣和環境狀態下都可以駕駛的 level 5 自動駕駛貨櫃車。
大學攤位參訪
這次參觀到的大學攤位是 WPI (Worcester Polytechnic Institute),伍斯特理工大學,在 Undergraduate Engineering Program School 排名當中是第 63 名,吉祥物是山羊,位於美國麻薩諸塞州的伍斯特市。
他們提供一年 10,000 美元,四年共 40,000 美元的 VEX 獎學金,只要出示參加過 VEX 比賽的證明(最好兩年以上),就可以申請獎學金。
這家學校是第一個有 Robot Engineering 的大學,另外他們在學生三四年級的時候會有 7 週的專題課程,算大學的三堂課。大學生會到不同的國家,想辦法使用 STEM 解決現實生活中的問題,我覺得和 FLL Challenge 的專題很像,不過是會真的去實踐的。
大學三年級的時候,學生會開始思考專題想法,到大學四年級時便會真的去和公司溝通,像是很多學生都會去日本做關於機器人的研發與專題研究,最令我印象深刻的是有學生設法協助視障和聽障人士搭乘大眾運輸工具。
我認為在訪問這家大學的過程中,我可以很清楚的明白他們的特色,也是我第一次聽到大學課堂中有類似 FLL 專題的課程,非常有趣。這個攤位上的介紹人員很詳細的說明,讓我感到很親切。
5/8-5/10 比賽過程分享
第一天-5/8 星期日
第一天的行程,中午 12:00 開放隊伍入場布置攤位並在 12:30 開始機器的檢錄(inspection),下午 1:00 便開放 Skills 比賽場地,下午 6:00 有國中組的進場儀式介紹所有來參加世界賽的國家,結束後就收拾回飯店休息,這一天當中共用掉四次的 Skills 機會,兩次 driver,兩次 auto。
最後用掉四次 skills 的結果,driver 得到的分數是 130 和 55 分,在第二場因為出發時談射裝置彈起導致球滾入必須重新返回出發區出發,導致時間的延誤,最終只拿到 55 分。Auto 的部分得到 50 和 101 分,因為場地的不同,現場的場地也並非完全平整,沒有跑出高分,但最終在第一天的排名仍位於第一名。
第二天-5/9 星期日
第二天的行程當中,早上 7:30 開放入場,8:15 則開始資格賽以及 Skills 的比賽場地,一直到晚上 7:00 所有賽事結束,才收拾回飯店休息。而這一天總共打了八場團隊合作挑戰賽以及用掉最後兩次 Skills 的機會。
首先介紹的是八場資格賽,早上三場,下午五場,其中有一場是練習賽,讓大家暖身並先預習和隊伍溝通的方式,基本上在練習賽當中就可以看出 division 中強隊和弱隊的區別。資格賽當中,目標是保持平均分在 140 分以上,甚至維持在第一名的位置,這樣在決賽中遇到的隊伍是強隊的機率更高,也更有機會打到最終決賽的 VEX Dome 當中。
練習場對到的隊伍是 51502V Bionic Lynx,來自美國艾奧瓦州的隊伍。他們的機器和 Ben Lipper 很像,但是沒有低掛,而且我覺得他們的機器組的不好,很多地方都是硬接上去,是斜的。我們使用的策略是 20 和 2 的策略,他們負責的是高掛牆角的兩顆球,但最後因為雙方都有點緊張漏掉一些球,只得 126 分。
我對他們的印象普通,可能因為在溝通上花上一點時間,策略為了配合他們不穩定的實力修改了很多次,有時在練習時也會開錯程式,機器的主機甚至會跑到一半掉下來,來來回回修改機器很多次。不過這一場練習賽過後,他們在遇到我們時也會給予鼓勵,在最終決賽時也有來觀賽,幫我們加油,也是有令我感動。
第一場資格賽遇到的是 10404A Cold Spring,他們來自美國印第安納州,機器可以吸六顆球,也可以做高掛,但是我覺得他們機器不是很精緻,很多橫桿凹凸不平,高掛彈起來也不是很穩定。
彈射裝置齒輪比:1:5 減速
底盤齒輪比:1:1 原速
Intake 齒輪比:3:2 加速
六球轉動裝置齒輪比:3:2 加速
我們使用的策略是 12 和 10 的策略,由我們打 12 顆球,最後在比賽中得到 152 分,因為對方漏掉兩顆,一顆低得分區一顆掉出去。
這一隊的實力雖然不錯,給我的印象卻很普通,因為他們對待機器的方式不是很友善,會用腳調整機器的位置,在調整高掛的橡皮筋鬆緊度時也沒有很仔細。不過在和他們的溝通當中很順暢,雖然射球不是很穩定,但是路徑都可以穩定的完成。
第二場資格賽遇到的是 50674D CSMS Stallions Stampede,來自美國佛羅里達州的隊伍。他們的機器是一台很基本的車子,但是可以一次投射兩顆球,有低掛系統,一場有信心可以發射 6 顆球。策略的部分是 16/6 的策略,他們漏掉一顆掉進低得分區,從原本的 158 分變成 154 分。吸球的部分用滑輪帶動,橡皮筋綁在彈射裝置後方,射一次球要等很久。
這一支隊伍的配合度偏高,印象也很好,我去他們攤位找人的時候,就算隊伍不在,教練和家長也會熱情招待,也會努力打電話聯繫,通知他們來我們攤位練習討論戰略,比賽結束後也贈送我和弟弟一人一袋紀念品。
第三場資格賽遇到的隊伍是 65950A Square Shaped Potatoes,來自美國紐約,他們是一個認真的隊伍,在我們去尋找之前就來我們攤位等了。他們的機器可以收集四顆球,還可以低掛,他們一分鐘可以清掉半場,但是沒有辦法處理柱子下面的那一顆球,所以使用的戰略是 14/8,我們處理柱子下的球。
最後得到的分數是 142,他們因為機器低掛設計的關係沒有成功低掛,也漏掉一顆球出去,我們則掉一顆球至低得分區。
我對這支隊伍的印象不錯,會提前來尋找當天的資格賽隊友,在溝通上也很順暢,練習時我們給予的建議也都會參考,然而我對於他們看待事情的方式不是很欣賞,在練習時遇到無法低掛的情形時不是設法解決問題,反而認為是場地問題決定不理會,導致最終在賽場上沒有成功低掛。
第四場對到的是 86006A Girl Power!,來自美國德州本土的隊伍。他們的機器是 Ben Lipper 的機器,收集四顆球加低掛,但是遙控真的不行,他們一分鐘只能夠射兩顆球,而且因為機器彈射結構的拋物線太低,進球率極低。
底盤齒輪比:3:2 加速
彈射裝置齒輪比:1:2 減速
策略的部分是 20/2 的策略,我們漏掉兩顆球,最後沒有高掛成功,對方則是因為彈射裝置爆炸和失敗的低掛,沒有得分,最後拿到 120 分。
他們是 Girl Powered 的隊伍,但是我對他們的印象很差,配合度也不好,他們的態度很自以為是,也不太會聽我們的策略,原本想要讓我們自己打全場加高掛,但是因為他們說教練叫他們至少要做一些事,所以堅持要投兩顆球。感覺他們對機器非常不了解,遙控彷彿才剛練習一天,連在吸球前需要先將射球裝置降下都不知道,但最令我憤怒的是,他們並沒有想要進步的心,並沒有想要和隊友討論戰術,覺得自己只要有做事情達到教練的要求就足夠。
第五次資格賽對到的隊伍是 8925A Pinecrest Pumas,來自美國佛羅里達州的隊伍,也是類似 Ben Lipper 的機器,他們可以收集四顆球並低掛,一分鐘大約可以投進 6 顆球。策略的部分是 16/6 策略,因為我們沒能射出一顆球,所以最終的得分是 152 分。
另外他們提到是我們的大粉絲,身上的徽章也只有我們一個隊伍的,可能跟我對日本隊的熱情是一樣的吧XD
機器側邊有一般輪胎的內框,如果裝上輪胎皮可以讓轉彎變的更精確,在 Auto 的時候會使用。
我對這支隊伍的印象還不錯,在等待我們比賽結束的過程中,他們有自己練習過,發現投完六顆球還剩下三十秒,決定改成 14/8 策略,雖然最終因為無法穩定輸出改回 16/6,而且在練習過程中我們兩隊機器位置時常擋到對方而練習許久,但是主動練習自己負責的部份很讓我欣賞。
第六次資格賽對到的隊伍是 13952D Phantom Troupe,整個攤位都有 cosplay 日本動漫的角色,操作手的兩位,一個穿著東京卍復仇者當中的東京卍會衣服,一個扮演海賊王當中的托拉法爾加·D·瓦特爾·羅,在攤位上也有一位隊員扮演狂賭之淵的主角蛇喰夢子,因為和日本動漫有關係,印象很深刻。
他們的機器也是 Ben Lipper 機器的改版,可以收集四顆球並低掛,策略是 12/10 策略,而柱子下方的兩顆球也都是我們自行處理,最終打出兩台機器的最高分 158 分!
這一支隊伍的配合度和實力都很好,尤其射球的穩定度非常好,雖然在練習過程中,有時因為時間不足沒有打完 10 顆球,但是在正式比賽場上有穩定輸出,最終讓我們拿到很好的分數。
第七場資格賽對到的隊伍是 7774A Räpsters,來自芬蘭的隊伍,他們的機器也是類似 Ben Lipper 的機器,可以收集四顆球並低掛,隊伍全員都是女生,在討論戰略時主要是由一位英文較好的女生溝通,內部討論都是使用芬蘭語。
策略的部分是 12/10 的策略,柱子下的兩顆球一樣是我們處理,最終我們不幸在高掛前最後一次射球中,兩顆球因不明原因並排,最終在高掛的過程中也沒能射進任何得分區,得到的分數是 146 分。
我對這一隊的印象很好,和上一隊一樣的配合度和實力都很好,射球的穩定度也很高,相比上一個隊友在練習時有時還跑不完,這一支隊伍的穩定度很高,在練習時幾乎沒有什麼狀況,很順利的完成一場比賽。
在資格賽結束後,我們使用做志工得來的兩張 Fast Pass,完成最終各一場的 driver 跟 auto 機會,分別得到 140 分和 91 分,最終以 driver 140 分和 auto 101 分的 241 總分得到 skills 排名第五名。
第三天-5/10 星期日
第三天的行程中,早上有最後三場的資格賽,下午 2:30 則開始 division 內部的決賽和頒獎,最終在 division 決賽中勝出的隊伍便可以晉級到 VEX Dome 當中打最後的決賽,選出 2021-2022 賽季的團隊挑戰賽冠軍。
第八場資格賽遇到的是 1696Z Overdrive,來自美國亞利桑那州的隊伍,他們是去年 2020-2021 Rise Above 賽季中的 Science Division 當中的 Excellence Award 和 Teamwork Champion 得獎者,在第二天快結束時,我前往他們攤位討論戰略,決定使用 12/10 策略,而我們自行處理柱子下的那顆球。
他們的機器可以收集六顆球,也可以完成高掛任務,在自主的時候會拆卸掉高掛系統,原本在第二天的討論過後認為這一場有機會可以拿到 162 分的滿分,但是在實際練習過後還是發現不太可能,主要的原因是他們射球和吸球都太過不穩定。
賽場上,不管是射球還是吸球都怪怪的,有時候射球會被蓋火鍋,有時會不小心一次吸三顆球導致球進不去,最終因為兩顆在外,一顆在低得分區,加上對方沒有高掛,僅得到 136 分。我學到的是不要因為他們曾經得過的獎項去完全判斷一支隊伍的強弱,策略也還是得按照練習的狀況去做調整,如果可以重來,我希望我們做 14/8 或 16/6 的策略。
另外在這場資格賽前發生一個意想不到的事件,在練習的途中,我們發現右邊的輪子沒辦法在承重的狀況下運作,原本以為是馬達軸斷掉,但是拆開來檢查後並沒有發現任何異常,開始緊張起來。在緊急時刻詢問老師的意見,他建議我們檢查馬達,果不其然右邊的馬達擴孔導致旋轉起來怪怪的,幸好在更換過馬達之後,遙控恢復正常。
第九場資格賽遇到的是 88701B OPS Robot 2,來自德國的隊伍,是一台沒有懸掛系統的推球機,遇到這種隊伍最麻煩的事情是最高分僅在 152 分,表示我們如果要得到 150 分以上必須沒有任何失誤。
策略的部分是採用 22/0,原本想讓他們在原地不動,但對方想要展現一點團隊合作的樣子,經過討論和協調後,讓他們幫忙推出柱子下的球,減輕我們的負擔。雖然在上場前練習過很多次也成功清場,但在正式賽場上我還是太過於緊張,提早吸球導致球卡在談射裝置和棘輪中間,加上後面高掛彈起來,最終只拿到 48 分。
我對這一支隊伍的印象很好,在和他們溝通並討論策略的過程中,並沒有任何爭執或讓我們困擾的地方,良好的協調也讓我們最終規劃出不錯的策略,就算最終在比賽沒能打出預想中的結果,但他們也在賽後安慰我們,並幫忙加油打氣,真的很幸運可以遇到這麼 nice 的隊伍。
第十場也就是最後一場資格賽遇到的是 34342A Mechanical Sea Serpents,來自美國華盛頓州的隊伍。特別的是他們的機器是 Ben Lipper 的機型配上自己發明的高掛系統,曾經是 Ben Lipper 機器的我們完全了解在這種沉重的機器上加高掛的難度,加上他們射球的超強穩定性,可以做到這個程度真的不容易。
策略的部分,因為他們沒有辦法戳出柱子下的球,我們便用 10/12 策略,讓他們拿 12 顆球並吸取柱子下的兩顆球,最終因為我們失誤漏一顆球至低得分區,得到 158 分。
最後在決賽中我們以永遠的資格賽排名第一名遇上的隊伍是 29766C Quarry Lads & Lassies C,來自美國印第安那州的隊伍。他們的機器很特別,看起來包覆的很隱密,用了兩大塊 12x12 的板子蓋住機器側邊,也在上面用釘子做出字母 C 的形狀,機器可以收集四顆球並高掛,而且高掛非常快。
策略的部分是 12/10 的策略,但可怕的是在決賽前的練習當中,他們的射球呈現不太穩定的狀態,常常漏掉一兩顆球,後來發現是因為在吐球的時候,有機會將彈射裝置上的兩顆球壓進球架中導致球的軌道改變,所以在決賽時都是吸兩顆投兩顆的策略。
Division 決賽競爭相當激烈,第一場就打出 154 分的高分,其中在決賽也可以看到許多之前配對過的隊伍,在第五場決賽中可以看到 7774A 和 13952D 的聯隊,兩隊都是之前的隊友,他們也穩定輸出,達到兩台低掛機的天花板 154 分。
我們的第一場決賽,因為上一場對方有失誤漏掉一顆球進低得分區,所以比較不緊張,就算不幸漏掉一顆球也會打成平手。隊友 29766C 在射球中不小心射進一顆低得分區,以 158 分平手開始 tie breaker 的決賽加賽場次。
幸好在第二次決賽當中,對手因為失誤只拿到 152 分,我們則很放鬆的上場比賽,這次我方沒有任何失誤拿下 162 分,取得在 VEX Dome 打最終決賽的資格,也同時成為 Spirit Division 當中的冠軍。
雖然打進 VEX Dome 的決賽殿堂,卻很可惜的因為隊友 29766C 的失誤,在發射最後兩顆球前不小心按到彈射按鈕,最終為了救一顆球沒有完成高掛,僅得到 148 分,成為這個賽季當中的最後一場比賽。雖然很可惜沒能獲勝,但是能夠進去 VEX Dome 已經很不容易,所以最後我還是面帶笑容和隊友擊掌並在觀眾區為剩下的台灣隊伍加油。
成績總結
在這次的 VEX IQ 世界賽國中組當中獲得的獎項是 Spirit Division Teamwork Champion 以及 Think Award,分別是分區團隊挑戰賽冠軍以及巧思獎。
分區團隊挑戰賽冠軍是我們歷經一天半的努力,從最一開始的練習賽,不斷和不同的隊伍討論戰術也不斷練習,在十場資格賽中取八場最高分計算出平均分後,按照排名配對決賽的隊友,最後穩定表現而得來的獎項。
巧思獎是頒發給自動程式當中,擁有令裁判眼睛為之一亮的策略規劃和程式撰寫,經過裁判的判決之後,在每一個分區當中選出最優秀的隊伍頒發,這是我們第一次得知也是第一次獲得這個獎項。
這兩個獎項中包含從賽季剛開始的生澀、賽季中每一場比賽中的勝利、每一場比賽中的敗北、機器人進化過程中的三代型態、持之以恆的練習以及努力向上的精神,整個賽季中的努力構成最後的佳績,真的很開心能夠拿到這些獎項。
賽後心得總結
.jpg)
我認為在這個比賽當中,最棒的事情是和其他隊伍交流和討論的樂趣,不只是在比賽前戰略的討論,互相加油和鼓勵的瞬間也很令人印象深刻。
最令我印象深刻的是第九場資格賽,和 88701B OPS Robot 2,來自德國的隊伍組成的聯隊。因為他們是推球機而且沒有低掛,所以策略是我們打 22 顆球,並讓對方幫忙推出一顆球,反覆在攤位上練習之後,終於到達最終的比賽現場。
在場上,因為我在射球的過程中,太快按下吸球按鈕,導致一顆球卡在射球裝置和棘輪中間,沒有辦法救出來,只好拿到出發區手動解決問題。不過在出發後不久,因為高掛的鉤子打到旁邊的牆壁並彈起來,導致過不了低掛的桿子,只得再次抓回出發區,最終因為時間不足,只拿到 48 分。
這時我看著因為自己的失誤造成的悲劇,不禁流下眼淚,內心全是難受,彷彿掉入無盡的深淵,想吶喊卻無法出聲,想重新來過卻已經成為無法撫平的傷痛。這時感受到的是德國隊友輕輕拍著我的肩膀,和我們說「沒關係,你們已經很強了,我們會去看你們的決賽的!」,其他在觀眾席中匹配過的隊伍們也紛紛下來鼓勵我們,他們的熱情和鼓勵使我打起精神,下定決心下一場一定要贏回來!
後來在最後的資格賽和 Division 決賽當中都拿到不錯的成績,比賽前後也都有許多隊伍和祝我們好運並幫忙加油,真的很感動,竟然有這麼多支隊伍記得曾經和他們匹配過資格賽的我們。
在台灣很少可以看到這麼熱烈幫忙加油的隊伍,聽到的有些都是希望隊伍失敗的聲音,但在美國世界賽中體驗到的熱情,真的是令我無法遺忘的。
在這次的比賽當中我學到最重要的事情是和隊友討論戰術的方法,有時候對方的執著會讓你不得不再多分配一些球給他們,但最終我們還是可以打出不低的分數。
在詢問時,我首先會問的是他們機器結構的設計,先判斷他們是否可以高低掛以及可以完成的球數,接著是了解一分鐘內最把握一定可以投進幾顆球,再來思考策略。
在這次的比賽當中,有遇到很多 Ben Lipper 機型的機器,機器的功能相同,但遙控熟練程度就相差很大,有一些隊伍可以打半邊的球,有一些卻只能完成兩顆球不到,所以不只是機型,遙控成績也是很重要的。
其中也會遇到一些四顆球高掛的機器,他們回答 Driver 可以完成 16-18 顆球,射球卻不是很穩定,因為當時看在他們去年得到 Excellence 獎項的份上,我沒有更改原本 12/10 的策略,沒想到在場上因為對方漏掉兩顆而只有 146 分。下次我學到如果看到對方射球不是很穩定,不要害怕提出修改策略的意見,才能夠提高得高分的機率,也學到並不是經過詢問就可以決定策略,還是需要實際練習。
有時候遇到的是無法做高得分區投射,或沒辦法投很多顆球的隊伍,以這次的經驗來說,在溝通的過程中不太可能完全讓我們自己打 22 顆球的策略。因為對方想要做到團隊該有的合作,這時候我學到的是可以讓一些但是不要託付太多任務,並適時的鼓勵他們,使對方在練習中可以感受到存在感以及自己的重要性,這樣更容易達成協調。
在練習過程中修改策略也是會發生,有時因為對方無法處理管子下的球,我們必須自行推出再拿等等。但在這 12 次和隊友溝通的過程中我也領悟到很多說服的方式以及策略規劃的技巧。
在這次的比賽中,我想謝謝我的家人、老師、隊友以及所有在一旁加油和鼓勵我們的人,有你們才會有今天 Think Award 和 Division Teamwork Champion 的成績。
謝謝爸爸媽媽讓我順利出國比賽,在這次的世界賽之旅我學到了很多,也體驗到世界賽獨特的地方,更謝謝你們願意支持我在機器人領域上耕耘,真的很開心。
謝謝海龜老師的指導,在最後一天機器底盤右邊突然無法正常運作,最終在老師的幫忙下發現了馬達擴孔的問題。不僅僅是在比賽中的協助,老師也在機器人研發上幫助我們解決很多問題,不管是在自主程式上還是策略規劃,都會和我們討論出最好的解決方案。
謝謝所有幫忙處理餐點以及攤位的家長們,讓我們在比賽過程減輕很多負擔,在晚上也有點心可以食用。
謝謝 6699R、6699Z、6655A、6677A、66799T,和我一起在不同 Division 當中努力,一起為台灣爭光,總共獲取 15 個獎項。謝謝所有曾經和我們匹配過的隊伍,大家努力的配合與調整,才會有今天 Division Champion 的成績。謝謝所有幫我們加油打氣的隊伍,在我們傷心時給予安慰,在緊張時給予鼓勵,讓我們順利的完成這場持續三天的比賽。
明年我們還會再挑戰一次世界賽的殿堂,希望可以在 Auto 和 Driver 上進步,穩定拿下分數,也希望明年不只可以再次進入 VEX Dome 拿下世界冠軍,也可以得到今年未達成的目標,Excellence Award。
比賽相關連結
總統、副總統賀電





.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)


.jpg)












.jpg)



.jpg)
.jpg)














.jpeg)


.jpg)

